




ตัวควบคุมอคติ MZM ความแม่นยำสูงพิเศษ ตัวควบคุมอคติอัตโนมัติ


คุณสมบัติ
• การควบคุมแรงดันไบแอสบนค่า Peak/Null/Q+/Q−
• การควบคุมแรงดันไบแอสบนจุดใดก็ได้
• การควบคุมที่แม่นยำเป็นพิเศษ: อัตราการสูญพันธุ์สูงสุด 50dB ในโหมด Null;
ความแม่นยำ ±0.5° ในโหมด Q+ และ Q−
• แอมพลิจูดไดเทอร์ต่ำ:
0.1% Vπ ที่โหมด NULL และโหมด PEAK
2% Vπ ที่โหมด Q+ และโหมด Q−
• ความเสถียรสูง: พร้อมการใช้งานแบบดิจิทัลเต็มรูปแบบ
• โปรไฟล์ต่ำ: 40 มม.(W) × 30 มม.(D) × 10 มม.(H)
• ใช้งานง่าย: ใช้งานแบบแมนนวลด้วยจัมเปอร์ขนาดเล็ก;
การดำเนินงาน OEM ที่ยืดหยุ่นผ่าน MCU UART2
• สองโหมดที่แตกต่างกันเพื่อให้แรงดันไบแอส: ก. การควบคุมไบแอสอัตโนมัติ
ข.แรงดันไบแอสที่ผู้ใช้กำหนด

แอปพลิเคชัน
• LiNbO3 และโมดูเลเตอร์ MZ อื่นๆ
• ดิจิตอล NRZ, RZ
• การใช้งานแบบพัลส์
• ระบบการกระเจิงของ Brillouin และเซ็นเซอร์ออปติคอลอื่นๆ
• เครื่องส่งสัญญาณ CATV
ผลงาน
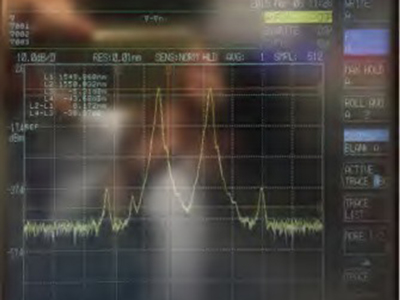
รูปที่ 1 การปราบปรามของผู้ให้บริการ
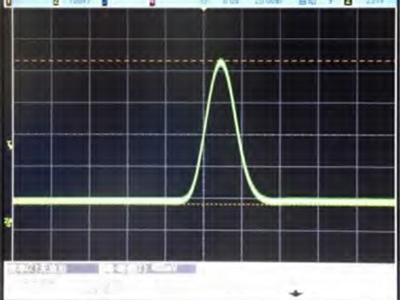
รูปที่ 2 การสร้างพัลส์

รูปที่ 3 กำลังสูงสุดของโมดูเลเตอร์
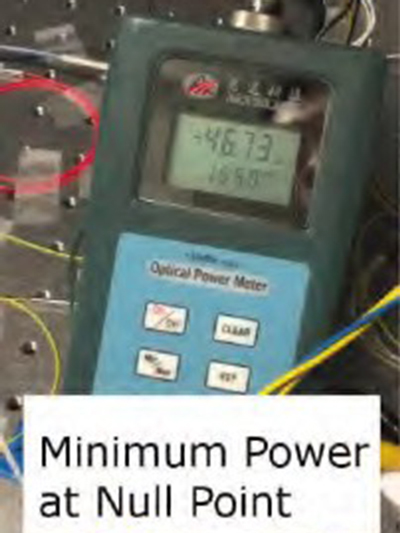
รูปที่ 4 พลังงานขั้นต่ำของโมดูเลเตอร์
อัตราส่วนการสูญเสีย DC ของ Maxim
ในการทดลองนี้ ไม่มีการใช้สัญญาณ RF กับระบบมีการตรวจวัดการสูญเสีย DC บริสุทธิ์
1. รูปที่ 5 แสดงให้เห็นถึงกำลังแสงของเอาท์พุตโมดูเลเตอร์ เมื่อโมดูเลเตอร์ควบคุมที่จุดพีคมันแสดง 3.71dBm ในแผนภาพ
2. รูปที่ 6 แสดงกำลังแสงของเอาต์พุตโมดูเลเตอร์ เมื่อโมดูเลเตอร์ควบคุมที่จุดว่างมันแสดง -46.73dBm ในแผนภาพในการทดลองจริง ค่าจะแตกต่างกันไปประมาณ -47dBmและ -46.73 เป็นค่าคงที่
3. ดังนั้น อัตราส่วนการสูญเสีย DC ที่เสถียรที่วัดได้คือ 50.4dB
ข้อกำหนดสำหรับอัตราการสูญพันธุ์สูง
1. โมดูเลเตอร์ระบบจะต้องมีอัตราการสูญพันธุ์สูงลักษณะของโมดูเลเตอร์ระบบจะตัดสินว่าอัตราการสูญเสียสูงสุดสามารถทำได้
2. โพลาไรเซชันของไฟอินพุตโมดูเลเตอร์จะต้องได้รับการดูแลโมดูเลเตอร์มีความไวต่อโพลาไรเซชันโพลาไรซ์ที่เหมาะสมสามารถปรับปรุงอัตราการสูญพันธุ์ได้มากกว่า 10dBในการทดลองในห้องปฏิบัติการ โดยปกติแล้วจะต้องใช้ตัวควบคุมโพลาไรเซชัน
3. ตัวควบคุมอคติที่เหมาะสมในการทดลองอัตราส่วนการสูญเสีย DC ของเรา พบว่ามีอัตราส่วนการสูญเสียที่ 50.4dBในขณะที่เอกสารข้อมูลของผู้ผลิตโมดูเลเตอร์ระบุเพียง 40dBเหตุผลของการปรับปรุงนี้ก็คือ modulator บางตัวเลื่อนไปเร็วมากตัวควบคุมไบแอส Rofea R-BC-ANY จะอัปเดตแรงดันไบแอสทุกๆ 1 วินาทีเพื่อให้แน่ใจว่าการตอบสนองที่รวดเร็ว
ข้อมูลจำเพาะ
| พารามิเตอร์ | นาที | ประเภท | สูงสุด | หน่วย | เงื่อนไข |
| ประสิทธิภาพการควบคุม | |||||
| อัตราส่วนการสูญพันธุ์ | เมอร์ 1 | 50 | dB | ||
| CSO2 | −55 | −65 | −70 | เดซิเบล | ความกว้างของดิเทอร์: 2%Vπ |
| เวลาคงตัว | 4 | s | จุดติดตาม: Null & Peak | ||
| 10 | จุดติดตาม: Q+ & Q- | ||||
| ไฟฟ้า | |||||
| แรงดันไฟบวก | +14.5 | +15 | +15.5 | V | |
| กระแสไฟบวก | 20 | 30 | mA | ||
| แรงดันไฟลบ | -15.5 | -15 | -14.5 | V | |
| กระแสไฟลบ | 2 | 4 | mA | ||
| ช่วงแรงดันไฟฟ้าขาออก | -9.57 | +9.85 | V | ||
| ความแม่นยำของแรงดันไฟฟ้าขาออก | 346 | µV | |||
| ความถี่ดิเทอร์ | 999.95 | 1,000 | 1,000.05 | Hz | เวอร์ชัน: สัญญาณไดเทอร์ 1kHz |
| แอมพลิจูดแบบดิเทอร์ | 0.1%วีπ | V | จุดติดตาม: Null & Peak | ||
| 2%วีπ | จุดติดตาม: Q+ & Q- | ||||
| ออปติคัล | |||||
| อินพุตพลังงานแสง3 | -30 | -5 | เดซิเบลเมตร | ||
| ความยาวคลื่นอินพุต | 780 | 2000 | nm | ||
1. MER หมายถึงอัตราการสูญพันธุ์ของโมดูเลเตอร์อัตราส่วนการสูญเสียที่เกิดขึ้นโดยทั่วไปคืออัตราส่วนการสูญเสียของโมดูเลเตอร์ที่ระบุในแผ่นข้อมูลโมดูเลเตอร์
2. CSO หมายถึงลำดับที่สองแบบผสมเพื่อวัด CSO ได้อย่างถูกต้อง จะต้องรับประกันคุณภาพเชิงเส้นของสัญญาณ RF โมดูเลเตอร์ และตัวรับสัญญาณนอกจากนี้ การอ่าน CSO ของระบบอาจแตกต่างกันเมื่อทำงานที่ความถี่ RF ที่แตกต่างกัน
3. โปรดทราบว่าพลังงานแสงอินพุตไม่สอดคล้องกับพลังงานแสงที่จุดไบแอสที่เลือกมันหมายถึงกำลังแสงสูงสุดที่โมดูเลเตอร์สามารถส่งออกไปยังตัวควบคุมได้ เมื่อแรงดันไบแอสอยู่ในช่วงตั้งแต่ −Vπ ถึง +Vπ
หน้าจอผู้ใช้
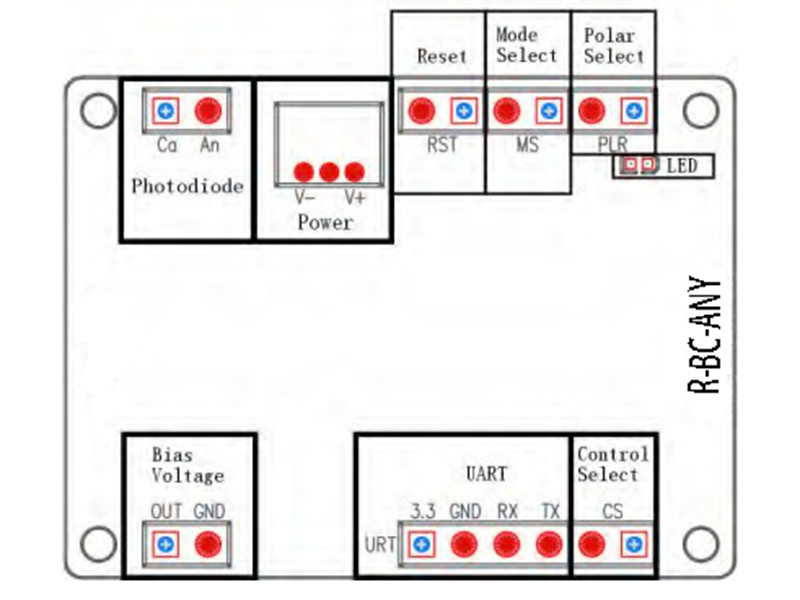
รูปที่5.การประกอบ
| กลุ่ม | การดำเนินการ | คำอธิบาย |
| โฟโตไดโอด 1 | PD: เชื่อมต่อแคโทดของโฟโตไดโอด MZM | ให้ข้อเสนอแนะ photocurrent |
| GND: เชื่อมต่อแอโนดของโฟโตไดโอด MZM | ||
| พลัง | แหล่งพลังงานสำหรับตัวควบคุมอคติ | V-: เชื่อมต่อขั้วลบ |
| V+: เชื่อมต่อขั้วบวก | ||
| หัววัดกลาง: เชื่อมต่ออิเล็กโทรดกราวด์ | ||
| รีเซ็ต | ใส่จัมเปอร์แล้วดึงออกหลังจากผ่านไป 1 วินาที | รีเซ็ตคอนโทรลเลอร์ |
| เลือกโหมด | ใส่หรือดึงจัมเปอร์ออก | ไม่มีจัมเปอร์: โหมด Null;พร้อมจัมเปอร์: โหมด Quad |
| โพลาร์ซีเล็ค2 | ใส่หรือดึงจัมเปอร์ออก | ไม่มีจัมเปอร์: ขั้วบวก;พร้อมจัมเปอร์: ขั้วลบ |
| แรงดันอคติ | เชื่อมต่อกับพอร์ตแรงดันไบแอส MZM | OUT และ GND ให้แรงดันไบแอสสำหรับโมดูเลเตอร์ |
| นำ | อย่างต่อเนื่อง | การทำงานภายใต้สภาวะที่มั่นคง |
| เปิด-ปิดหรือปิดทุกๆ 0.2 วินาที | ประมวลผลข้อมูลและค้นหาจุดควบคุม | |
| เปิด-ปิดหรือปิดทุกๆ 1 วินาที | กำลังแสงอินพุตอ่อนเกินไป | |
| เปิด-ปิดหรือปิดทุกๆ 3 วินาที | กำลังแสงอินพุตแรงเกินไป | |
| ยูอาร์ที | ใช้งานคอนโทรลเลอร์ผ่าน UART | 3.3: 3.3V แรงดันอ้างอิง |
| GND: พื้น | ||
| RX: รับคอนโทรลเลอร์ | ||
| TX: การส่งสัญญาณของคอนโทรลเลอร์ | ||
| ควบคุม เลือก | ใส่หรือดึงจัมเปอร์ออก | ไม่มีจัมเปอร์: การควบคุมจัมเปอร์; พร้อมจัมเปอร์: การควบคุม UART |
1. โมดูเลเตอร์ MZ บางตัวมีโฟโตไดโอดภายในควรเลือกการตั้งค่าคอนโทรลเลอร์ระหว่างการใช้โฟโตไดโอดของคอนโทรลเลอร์ หรือใช้โฟโตไดโอดภายในของโมดูเลเตอร์ขอแนะนำให้ใช้โฟโตไดโอดของคอนโทรลเลอร์สำหรับการทดลองในห้องปฏิบัติการด้วยเหตุผลสองประการประการแรก โฟโตไดโอดของคอนโทรลเลอร์รับประกันคุณภาพประการที่สอง ปรับความเข้มของแสงอินพุตได้ง่ายกว่าหมายเหตุ: หากใช้โฟโตไดโอดภายในของโมดูเลเตอร์ โปรดตรวจสอบให้แน่ใจว่ากระแสเอาท์พุตของโฟโตไดโอดเป็นสัดส่วนอย่างเคร่งครัดกับกำลังไฟฟ้าเข้า
2. Polar pin ใช้เพื่อสลับจุดควบคุมระหว่าง Peak และ Null ในโหมดควบคุม Null (กำหนดโดย Pin เลือกโหมด) หรือ Quad +
และโหมดควบคุม Quad- ในโหมด Quadหากไม่ได้เสียบจัมเปอร์ของโพลาร์พิน จุดควบคุมจะเป็น Null ในโหมด Null หรือ Quad+ ในโหมด Quadความกว้างของระบบ RF จะส่งผลต่อจุดควบคุมด้วยเมื่อไม่มีสัญญาณ RF หรือความกว้างของสัญญาณ RF มีขนาดเล็ก ตัวควบคุมจะสามารถล็อคจุดทำงานให้ถูกต้องตามจุดที่เลือกโดยจัมเปอร์ MS และ PLRเมื่อความกว้างของสัญญาณ RF เกินเกณฑ์ที่กำหนด ขั้วของระบบจะเปลี่ยนไป ในกรณีนี้ ส่วนหัว PLR ควรอยู่ในสถานะตรงกันข้าม กล่าวคือ ควรเสียบจัมเปอร์หากไม่ได้เสียบอยู่ หรือดึงออกหากเสียบไว้
การใช้งานทั่วไป
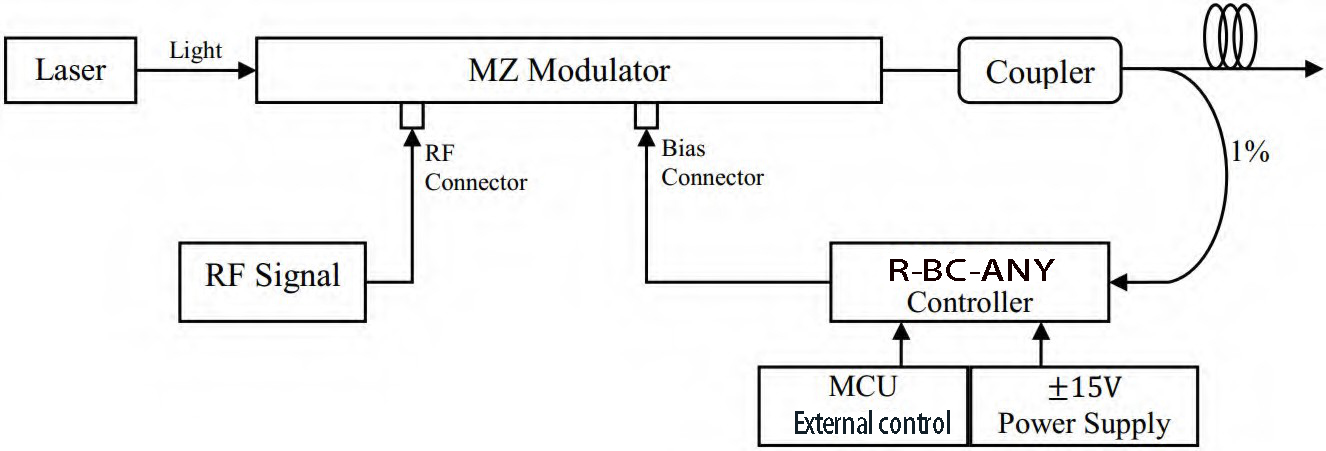
คอนโทรลเลอร์ใช้งานง่าย
ขั้นตอนที่ 1.เชื่อมต่อพอร์ต 1% ของข้อต่อเข้ากับโฟโตไดโอดของคอนโทรลเลอร์
ขั้นตอนที่ 2.เชื่อมต่อเอาต์พุตแรงดันไบแอสของคอนโทรลเลอร์ (ผ่าน SMA หรือส่วนหัว 2 พิน 2.54 มม.) เข้ากับพอร์ตไบแอสของโมดูเลเตอร์
ขั้นตอนที่ 3ให้คอนโทรลเลอร์ที่มีแรงดันไฟฟ้า +15V และ -15V DC
ขั้นตอนที่ 4รีเซ็ตคอนโทรลเลอร์และมันจะเริ่มทำงาน
บันทึก.โปรดตรวจสอบให้แน่ใจว่าสัญญาณ RF ของทั้งระบบเปิดอยู่ก่อนที่จะรีเซ็ตคอนโทรลเลอร์
Rofea Optoelectronics นำเสนอกลุ่มผลิตภัณฑ์ของตัวปรับแสงไฟฟ้าเชิงพาณิชย์, ตัวปรับเฟส, ตัวปรับความเข้ม, ตัวตรวจจับแสง, แหล่งกำเนิดแสงเลเซอร์, เลเซอร์ DFB, ตัวขยายแสง, EDFA, เลเซอร์ SLD, การมอดูเลต QPSK, เลเซอร์พัลส์, เครื่องตรวจจับแสง, เครื่องตรวจจับแสงที่สมดุล, ไดรเวอร์เลเซอร์ , เครื่องขยายสัญญาณไฟเบอร์ออปติก, มิเตอร์วัดกำลังแสง, เลเซอร์บรอดแบนด์, เลเซอร์แบบปรับได้, เครื่องตรวจจับแสง, ไดร์เวอร์เลเซอร์ไดโอด, เครื่องขยายสัญญาณไฟเบอร์นอกจากนี้เรายังมีโมดูเลเตอร์เฉพาะจำนวนมากสำหรับการปรับแต่ง เช่น โมดูเลเตอร์เฟสอาเรย์ 1*4, Vpi ต่ำพิเศษ และโมดูเลเตอร์อัตราส่วนการสูญเสียสูงพิเศษ ซึ่งส่วนใหญ่ใช้ในมหาวิทยาลัยและสถาบัน
หวังว่าผลิตภัณฑ์ของเราจะเป็นประโยชน์กับคุณและการวิจัยของคุณ

