




ตัวปรับสัญญาณแสงซิลิคอนสำหรับ FMCW
อย่างที่เราทราบกันดี หนึ่งในส่วนประกอบที่สำคัญที่สุดในระบบไลดาร์แบบ FMCW คือตัวปรับสัญญาณเชิงเส้นสูง หลักการทำงานแสดงอยู่ในรูปต่อไปนี้: การใช้งานตัวปรับสัญญาณ DP-IQซึ่งเป็นรากฐานการมอดูเลชั่นแบบแถบข้างเดียว (SSB)ส่วนบนและส่วนล่างเอ็มซีเอ็มทำงานที่จุดศูนย์ บนถนนและลงไปตามแถบข้างของ wc+wm และ WC-WM โดยที่ wm คือความถี่การมอดูเลชัน แต่ในขณะเดียวกัน ช่องสัญญาณด้านล่างจะทำให้เกิดความแตกต่างของเฟส 90 องศา และในที่สุดแสงของ WC-WM จะถูกยกเลิก เหลือเพียงพจน์การเลื่อนความถี่ของ wc+wm เท่านั้น ในรูป b เส้นสีน้ำเงิน LR คือสัญญาณชิป FM ในพื้นที่ เส้นสีส้ม RX คือสัญญาณสะท้อน และเนื่องจากผลของดอปเปลอร์ สัญญาณบีตสุดท้ายจึงสร้าง f1 และ f2
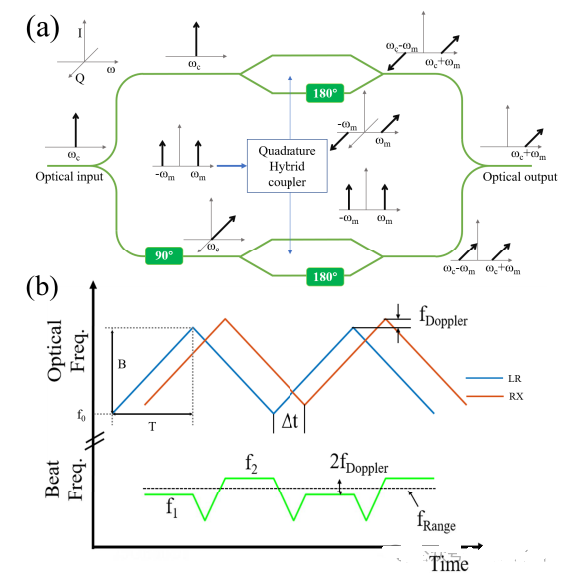
ระยะทางและความเร็วมีดังนี้:

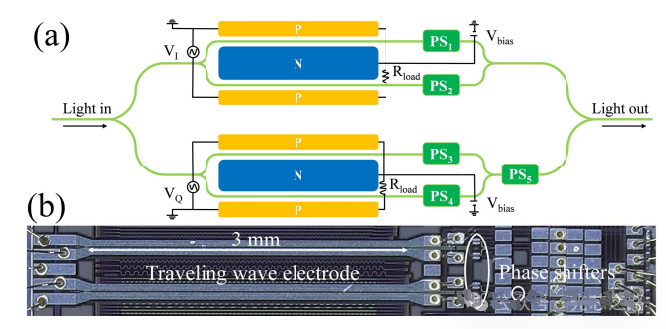
ต่อไปนี้เป็นบทความที่ตีพิมพ์โดยมหาวิทยาลัยเซี่ยงไฮ้เจียวตงในปี 2021 เกี่ยวกับเอสเอสบีเครื่องกำเนิดไฟฟ้าที่ใช้ FMCW โดยอิงตามตัวปรับแสงซิลิคอน.
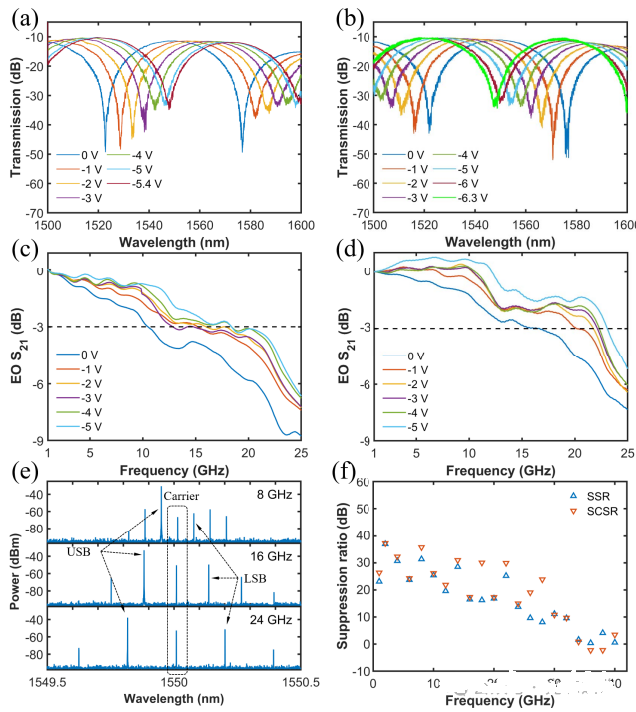
ประสิทธิภาพของ MZM แสดงได้ดังนี้: ความแตกต่างของประสิทธิภาพระหว่างตัวปรับสัญญาณแขนบนและแขนล่างค่อนข้างมาก อัตราส่วนการปฏิเสธแถบข้างของคลื่นพาห์จะแตกต่างกันไปตามอัตราการปรับความถี่ และผลลัพธ์จะแย่ลงเมื่อความถี่เพิ่มขึ้น
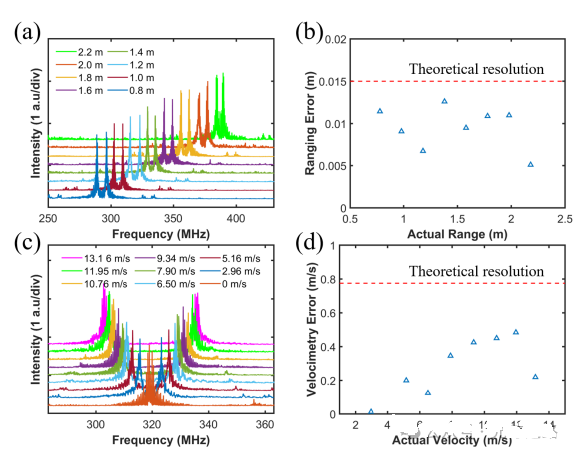
ในรูปต่อไปนี้ ผลการทดสอบของระบบ Lidar แสดงให้เห็นว่า a/b คือสัญญาณบีทที่ความเร็วเท่ากันและระยะทางต่างกัน และ c/d คือสัญญาณบีทที่ระยะทางเท่ากันและความเร็วต่างกัน ผลการทดสอบได้ค่า 15 มม. และ 0.775 ม./วินาที
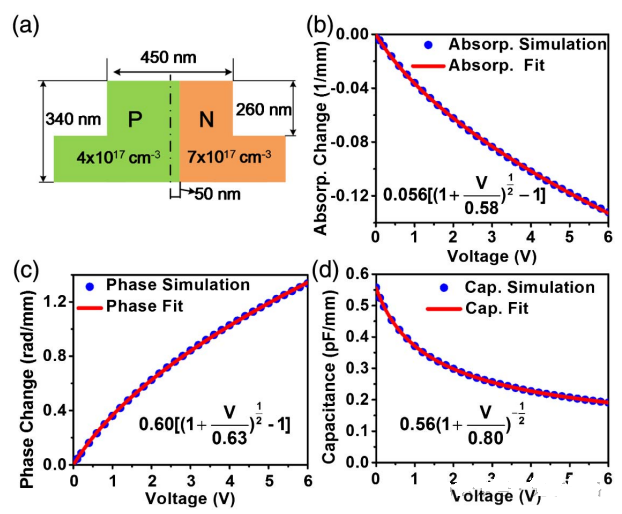
ในที่นี้ มีเพียงการประยุกต์ใช้ซิลิคอนเท่านั้นตัวปรับสัญญาณแสงมีการหารือเกี่ยวกับ FMCW ในความเป็นจริง ผลของตัวปรับสัญญาณแสงซิลิคอนนั้นไม่ดีเท่ากับของตัวปรับแต่ง LiNO3เนื่องจากในตัวปรับสัญญาณแสงซิลิคอน การเปลี่ยนแปลงเฟส/สัมประสิทธิ์การดูดกลืน/ความจุของรอยต่อจะไม่เป็นเชิงเส้นกับการเปลี่ยนแปลงของแรงดันไฟฟ้า ดังแสดงในรูปด้านล่าง:
นั่นคือ
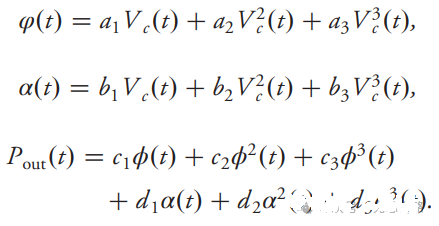
ความสัมพันธ์ของกำลังเอาต์พุตของตัวปรับสัญญาณระบบมีดังต่อไปนี้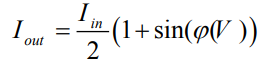
ผลลัพธ์ที่ได้คือการเบี่ยงเบนความถี่ระดับสูง:
สิ่งเหล่านี้จะทำให้สัญญาณความถี่บีตขยายกว้างขึ้นและอัตราส่วนสัญญาณต่อสัญญาณรบกวนลดลง ดังนั้น วิธีใดที่จะปรับปรุงความเป็นเชิงเส้นของตัวปรับแสงซิลิคอนได้? ในที่นี้เราจะกล่าวถึงเฉพาะคุณลักษณะของตัวอุปกรณ์เองเท่านั้น และจะไม่กล่าวถึงวิธีการชดเชยโดยใช้โครงสร้างเสริมอื่นๆ
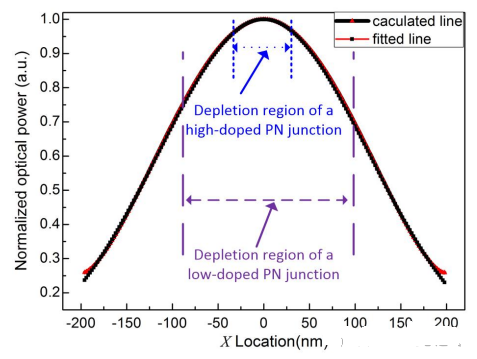
สาเหตุหนึ่งที่ทำให้เฟสการมอดูเลชันไม่เป็นเชิงเส้นกับแรงดันไฟฟ้าคือ สนามแสงในท่อนำคลื่นมีการกระจายตัวของพารามิเตอร์หนักและเบาที่แตกต่างกัน และอัตราการเปลี่ยนแปลงเฟสก็แตกต่างกันไปตามการเปลี่ยนแปลงของแรงดันไฟฟ้า ดังแสดงในภาพต่อไปนี้ บริเวณที่เกิดการพร่องประจุที่มีการรบกวนแบบหนักจะเปลี่ยนแปลงน้อยกว่าบริเวณที่เกิดการรบกวนแบบเบา
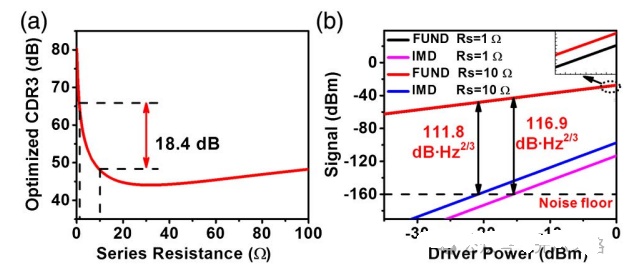
รูปต่อไปนี้แสดงเส้นโค้งการเปลี่ยนแปลงของความผิดเพี้ยนอินเตอร์โมดูเลชันอันดับที่สาม (TID) และความผิดเพี้ยนฮาร์มอนิกอันดับที่สอง (SHD) กับความเข้มข้นของสัญญาณรบกวน หรือก็คือความถี่การมอดูเลชัน จะเห็นได้ว่าความสามารถในการลดความผิดเพี้ยนของความถี่สำหรับสัญญาณรบกวนมากนั้นสูงกว่าสำหรับสัญญาณรบกวนน้อย ดังนั้น การผสมสัญญาณใหม่จึงช่วยปรับปรุงความเป็นเชิงเส้นได้

สิ่งที่กล่าวมาข้างต้นเทียบเท่ากับการพิจารณา C ในแบบจำลอง RC ของ MZM และควรพิจารณาอิทธิพลของ R ด้วย ต่อไปนี้คือเส้นกราฟแสดงการเปลี่ยนแปลงของ CDR3 กับความต้านทานอนุกรม จะเห็นได้ว่ายิ่งความต้านทานอนุกรมน้อยลงเท่าใด CDR3 ก็ยิ่งมากขึ้นเท่านั้น
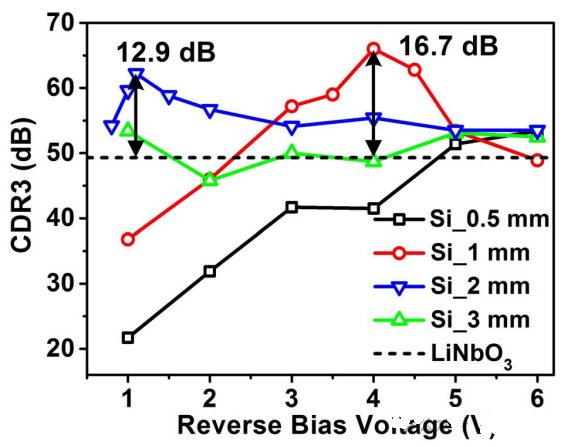
สุดท้ายนี้ ผลของตัวปรับสัญญาณซิลิคอนนั้นไม่จำเป็นต้องแย่ไปกว่าผลของ LiNbO3 เสมอไป ดังแสดงในรูปด้านล่าง CDR3 ของตัวปรับสัญญาณซิลิคอนค่าที่ได้จะสูงกว่าค่าของ LiNbO3 ในกรณีที่มีการไบแอสเต็มที่ โดยผ่านการออกแบบโครงสร้างและความยาวของตัวปรับสัญญาณอย่างเหมาะสม เงื่อนไขการทดสอบยังคงเหมือนเดิม
โดยสรุปแล้ว การออกแบบโครงสร้างของตัวปรับแสงซิลิคอนนั้นสามารถปรับปรุงได้เท่านั้น ไม่สามารถแก้ไขได้อย่างสมบูรณ์ และจำเป็นต้องมีการตรวจสอบเชิงทดลองว่าสามารถนำไปใช้ในระบบ FMCW ได้จริงหรือไม่ หากทำได้จริง ก็จะสามารถรวมระบบรับส่งสัญญาณเข้าด้วยกันได้ ซึ่งจะช่วยลดต้นทุนในระดับใหญ่ได้
วันที่โพสต์: 18 มีนาคม 2024