




การผสานรวมกล้องและ LiDAR เพื่อการตรวจจับที่แม่นยำ
เมื่อไม่นานมานี้ ทีมวิทยาศาสตร์ชาวญี่ปุ่นได้พัฒนาสิ่งที่ไม่เหมือนใครขึ้นมากล้อง LiDARเซ็นเซอร์ฟิวชั่น คือ LiDAR ตัวแรกของโลกที่รวมแกนแสงของกล้องและ LiDAR เข้าไว้ในเซ็นเซอร์เดียว การออกแบบที่เป็นเอกลักษณ์นี้ช่วยให้สามารถเก็บข้อมูลแบบโอเวอร์เลย์ที่ปราศจากพารัลแลกซ์ได้แบบเรียลไทม์ ความหนาแน่นของการฉายแสงเลเซอร์สูงกว่าเซ็นเซอร์เรดาร์เลเซอร์ทั้งหมดในโลก ทำให้สามารถตรวจจับวัตถุในระยะไกลและมีความแม่นยำสูง
โดยปกติแล้ว LiDAR จะถูกใช้ร่วมกับกล้องเพื่อระบุวัตถุได้อย่างแม่นยำยิ่งขึ้น แต่ข้อมูลที่ได้จากอุปกรณ์ต่าง ๆ จะมีความแตกต่างกัน ส่งผลให้เกิดความล่าช้าในการปรับเทียบระหว่างเซ็นเซอร์ เซ็นเซอร์แบบฟิวชั่นที่พัฒนาขึ้นใหม่นี้ได้รวมกล้องและ LiDAR ความละเอียดสูงเข้าไว้ในหน่วยเดียว ทำให้สามารถผสานรวมข้อมูลแบบเรียลไทม์ได้โดยไม่มีปัญหาเรื่องพารัลแลกซ์ ส่งผลให้ได้ผลลัพธ์ที่มีประสิทธิภาพและแม่นยำ
การผสานรวมกล้องและ LiDAR ช่วยให้การจดจำวัตถุมีความแม่นยำสูง ทีมงานใช้เทคโนโลยีการออกแบบทางแสงที่เป็นเอกลักษณ์เพื่อผสานรวมกล้องและ LiDAR เข้าไว้ในหน่วยเดียวที่มีแกนแสงที่ตรงกัน ทำให้สามารถผสานรวมข้อมูลภาพจากกล้องและข้อมูลระยะทางจาก LiDAR ได้แบบเรียลไทม์ ส่งผลให้ได้การจดจำวัตถุที่ล้ำหน้าที่สุดเท่าที่เคยมีมาเรดาร์เลเซอร์ด้วยความละเอียดสูงเป็นพิเศษ ผสานกับเซ็นเซอร์ฟิวชั่นที่มีความหนาแน่นของการปล่อยแสงเลเซอร์สูงสุดในโลก ทำให้ความหนาแน่นของลำแสงเลเซอร์ที่ปล่อยออกมาเพิ่มขึ้น ซึ่งสามารถระบุสิ่งกีดขวางขนาดเล็กในระยะไกลได้ จึงช่วยปรับปรุงความละเอียดและความแม่นยำ เซ็นเซอร์นวัตกรรมนี้มีความหนาแน่นของการฉายรังสี 0.045 องศา และใช้เทคโนโลยีหน่วยสแกนเลเซอร์ที่เป็นกรรมสิทธิ์จากเครื่องพิมพ์มัลติฟังก์ชัน (MFP) และเครื่องพิมพ์ทั่วไป เพื่อตรวจจับวัตถุที่ตกลงมาได้สูงถึง 30 เซนติเมตร ในระยะ 100 เมตร
เรดาร์เลเซอร์แบบกระจก MEMS ที่มีความทนทานสูงและเป็นกรรมสิทธิ์เฉพาะ จำเป็นต้องใช้กระจก MEMS หรือมอเตอร์เพื่อฉายแสงไปยังเป้าหมายเลเซอร์การตรวจจับความแม่นยำสูงสามารถทำได้ในพื้นที่กว้างและมีความหนาแน่นสูง อย่างไรก็ตาม ความละเอียดของกระจก MEMS มักต่ำ และมอเตอร์มักสึกหรอเร็ว เซ็นเซอร์แบบบูรณาการใหม่นี้ให้ความละเอียดสูงกว่าระบบที่ใช้มอเตอร์ และมีความทนทานมากกว่ากระจก MEMS แบบดั้งเดิม นักวิทยาศาสตร์ใช้เทคโนโลยีการผลิตขั้นสูง เทคโนโลยีบรรจุภัณฑ์เซรามิก และเทคโนโลยีการสแกนด้วยเลเซอร์ความละเอียดสูง เพื่อพัฒนากระจก MEMS ที่เป็นกรรมสิทธิ์เฉพาะ เพื่อรองรับการตรวจจับความแม่นยำสูงในอุตสาหกรรมต่างๆ เช่น ยานยนต์ไร้คนขับ เรือ เครื่องจักรกลหนัก เป็นต้น
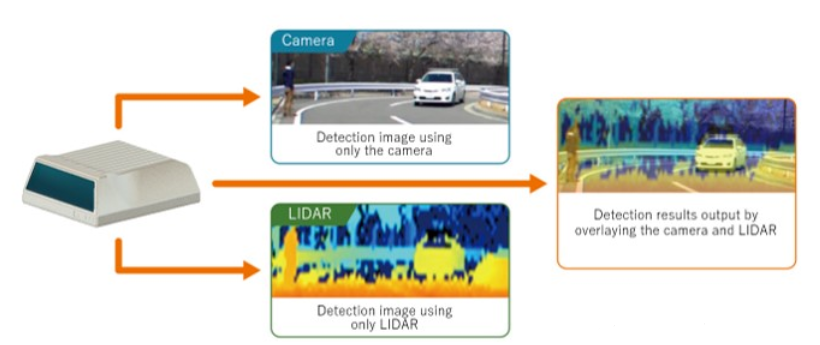
รูปที่ 1: ภาพที่ตรวจจับได้จากเซ็นเซอร์ฟิวชั่น LiDAR ของกล้อง
วันที่เผยแพร่: 10 กุมภาพันธ์ 2568