




การออกแบบโฟตอนิกวงจรรวม
วงจรรวมโฟตอนิกส์วงจร PIC มักถูกออกแบบโดยใช้สคริปต์ทางคณิตศาสตร์ เนื่องจากความยาวของเส้นทางมีความสำคัญในเครื่องวัดการรบกวนหรือแอปพลิเคชันอื่นๆ ที่ไวต่อความยาวของเส้นทางพิคPIC ผลิตขึ้นโดยการสร้างลวดลายหลายชั้น (โดยทั่วไป 10 ถึง 30 ชั้น) บนแผ่นเวเฟอร์ ซึ่งประกอบด้วยรูปทรงหลายเหลี่ยมจำนวนมาก มักแสดงในรูปแบบ GDSII ก่อนที่จะส่งไฟล์ไปยังผู้ผลิตโฟโตมาสก์ จำเป็นอย่างยิ่งที่จะต้องจำลอง PIC เพื่อตรวจสอบความถูกต้องของการออกแบบ การจำลองแบ่งออกเป็นหลายระดับ: ระดับต่ำสุดคือการจำลองทางแม่เหล็กไฟฟ้า (EM) สามมิติ ซึ่งการจำลองจะดำเนินการในระดับย่อยความยาวคลื่น แม้ว่าปฏิสัมพันธ์ระหว่างอะตอมในวัสดุจะถูกจัดการในระดับมหภาค วิธีการทั่วไป ได้แก่ วิธีไฟไนต์ดิฟเฟอเรนซ์ไทม์โดเมนสามมิติ (3D FDTD) และการขยายโหมดเฉพาะ (EME) วิธีการเหล่านี้มีความแม่นยำที่สุด แต่ไม่เหมาะสมสำหรับการจำลอง PIC ทั้งหมด ระดับถัดไปคือการจำลอง EM 2.5 มิติ เช่น การแพร่กระจายลำแสงไฟไนต์ดิฟเฟอเรนซ์ (FD-BPM) วิธีการเหล่านี้เร็วกว่ามาก แต่ความแม่นยำจะลดลง และสามารถจัดการได้เฉพาะการแพร่กระจายแบบพาราแอ็กเซียลเท่านั้น และไม่สามารถใช้จำลองตัวเรโซเนเตอร์ได้ เป็นต้น ระดับถัดไปคือการจำลอง EM แบบ 2 มิติ เช่น 2D FDTD และ 2D BPM วิธีการเหล่านี้ก็เร็วกว่าเช่นกัน แต่มีฟังก์ชันการทำงานที่จำกัด เช่น ไม่สามารถจำลองตัวหมุนโพลาไรเซชันได้ ระดับที่สูงขึ้นไปอีกคือการจำลองเมทริกซ์การส่งผ่านและ/หรือการกระเจิง แต่ละส่วนประกอบหลักจะถูกลดทอนลงเหลือส่วนประกอบที่มีอินพุตและเอาต์พุต และท่อนำคลื่นที่เชื่อมต่อจะถูกลดทอนลงเหลือองค์ประกอบการเปลี่ยนเฟสและการลดทอน การจำลองเหล่านี้เร็วมาก สัญญาณเอาต์พุตได้มาจากการคูณเมทริกซ์การส่งผ่านด้วยสัญญาณอินพุต เมทริกซ์การกระเจิง (ซึ่งองค์ประกอบเรียกว่าพารามิเตอร์ S) จะคูณสัญญาณอินพุตและเอาต์พุตด้านหนึ่งเพื่อหาสัญญาณอินพุตและเอาต์พุตอีกด้านหนึ่งของส่วนประกอบ โดยพื้นฐานแล้ว เมทริกซ์การกระเจิงจะประกอบด้วยการสะท้อนภายในองค์ประกอบ เมทริกซ์การกระเจิงมักจะมีขนาดใหญ่เป็นสองเท่าของเมทริกซ์การส่งผ่านในแต่ละมิติ โดยสรุปแล้ว ตั้งแต่การจำลอง 3D EM ไปจนถึงการจำลองเมทริกซ์การส่งผ่าน/การกระเจิง การจำลองแต่ละระดับจะมีความสมดุลระหว่างความเร็วและความแม่นยำ และผู้ออกแบบจะเลือกการจำลองในระดับที่เหมาะสมกับความต้องการเฉพาะของตนเพื่อเพิ่มประสิทธิภาพกระบวนการตรวจสอบความถูกต้องของการออกแบบ
อย่างไรก็ตาม การพึ่งพาการจำลองทางแม่เหล็กไฟฟ้าขององค์ประกอบบางอย่างและการใช้เมทริกซ์การกระเจิง/การถ่ายโอนเพื่อจำลอง PIC ทั้งหมด ไม่ได้เป็นการรับประกันว่าการออกแบบจะถูกต้องสมบูรณ์เมื่ออยู่ต่อหน้าแผ่นควบคุมการไหล ตัวอย่างเช่น ความยาวเส้นทางที่คำนวณผิดพลาด ท่อนำคลื่นแบบหลายโหมดที่ไม่สามารถระงับโหมดลำดับสูงได้อย่างมีประสิทธิภาพ หรือท่อนำคลื่นสองท่อที่อยู่ใกล้กันเกินไปซึ่งนำไปสู่ปัญหาการเชื่อมต่อที่ไม่คาดคิด มักจะไม่ถูกตรวจพบในระหว่างการจำลอง ดังนั้น แม้ว่าเครื่องมือจำลองขั้นสูงจะให้ความสามารถในการตรวจสอบความถูกต้องของการออกแบบที่มีประสิทธิภาพ แต่ก็ยังคงต้องการความระมัดระวังและการตรวจสอบอย่างรอบคอบจากผู้ออกแบบ ควบคู่ไปกับประสบการณ์จริงและความรู้ทางเทคนิค เพื่อให้มั่นใจในความถูกต้องและความน่าเชื่อถือของการออกแบบ และลดความเสี่ยงของแผ่นควบคุมการไหล
เทคนิคที่เรียกว่า sparse FDTD ช่วยให้สามารถทำการจำลอง FDTD แบบ 3 มิติและ 2 มิติได้โดยตรงบนการออกแบบ PIC ที่สมบูรณ์เพื่อตรวจสอบความถูกต้องของการออกแบบ แม้ว่าจะเป็นเรื่องยากสำหรับเครื่องมือจำลองทางแม่เหล็กไฟฟ้าใดๆ ในการจำลอง PIC ขนาดใหญ่มาก แต่ sparse FDTD สามารถจำลองพื้นที่เฉพาะที่ค่อนข้างใหญ่ได้ ใน FDTD แบบ 3 มิติแบบดั้งเดิม การจำลองจะเริ่มต้นด้วยการกำหนดค่าเริ่มต้นของส่วนประกอบทั้งหกของสนามแม่เหล็กไฟฟ้าภายในปริมาตรควอนตัมเฉพาะ เมื่อเวลาผ่านไป ส่วนประกอบสนามใหม่ในปริมาตรจะถูกคำนวณ และเป็นเช่นนี้เรื่อยไป แต่ละขั้นตอนต้องใช้การคำนวณจำนวนมาก ดังนั้นจึงใช้เวลานาน ใน sparse 3D FDTD แทนที่จะคำนวณในแต่ละขั้นตอนที่แต่ละจุดของปริมาตร จะมีการรักษาลิสต์ของส่วนประกอบสนามไว้ ซึ่งในทางทฤษฎีสามารถสอดคล้องกับปริมาตรขนาดใหญ่ได้ตามต้องการ และจะคำนวณเฉพาะส่วนประกอบเหล่านั้นเท่านั้น ในแต่ละขั้นตอนเวลา จุดที่อยู่ติดกับส่วนประกอบสนามจะถูกเพิ่ม ในขณะที่ส่วนประกอบสนามที่มีกำลังต่ำกว่าเกณฑ์ที่กำหนดจะถูกตัดทิ้ง สำหรับโครงสร้างบางประเภท การคำนวณนี้อาจเร็วกว่าวิธี FDTD 3 มิติแบบดั้งเดิมหลายเท่าตัว อย่างไรก็ตาม FDTD แบบสปาร์สทำงานได้ไม่ดีเมื่อต้องจัดการกับโครงสร้างแบบกระจายแสง เนื่องจากสนามเวลาจะกระจายตัวมากเกินไป ส่งผลให้รายการที่ได้ยาวเกินไปและจัดการได้ยาก รูปที่ 1 แสดงภาพหน้าจอตัวอย่างของการจำลอง FDTD 3 มิติที่คล้ายกับตัวแยกแสงโพลาไรซ์ (PBS)
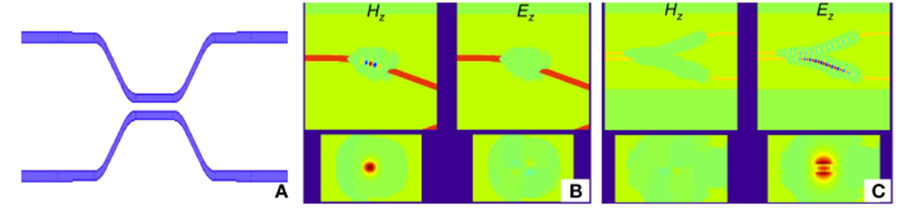
รูปที่ 1: ผลการจำลองจาก FDTD แบบสปาร์ส 3 มิติ (A) เป็นมุมมองด้านบนของโครงสร้างที่กำลังจำลอง ซึ่งก็คือตัวเชื่อมต่อทิศทาง (B) แสดงภาพหน้าจอของการจำลองโดยใช้การกระตุ้นแบบ quasi-TE แผนภาพสองภาพด้านบนแสดงมุมมองด้านบนของสัญญาณ quasi-TE และ quasi-TM และแผนภาพสองภาพด้านล่างแสดงมุมมองภาคตัดขวางที่สอดคล้องกัน (C) แสดงภาพหน้าจอของการจำลองโดยใช้การกระตุ้นแบบ quasi-TM
วันที่โพสต์: 23 กรกฎาคม 2567