




ตัวควบคุมไบแอสโมดูเลเตอร์ MZM ความแม่นยำสูงพิเศษ ตัวควบคุมไบแอสอัตโนมัติ


คุณสมบัติ
• การควบคุมแรงดันไบแอสบน Peak/Null/Q+/Q−
• การควบคุมแรงดันไบแอส ณ จุดใดๆ ก็ได้
• การควบคุมที่แม่นยำเป็นพิเศษ: อัตราส่วนการลดทอนสูงสุด 50dB ในโหมด Null;
ความแม่นยำ ±0.5◦ ในโหมด Q+ และ Q−
• แอมพลิจูดการสั่นต่ำ:
0.1% Vπ ในโหมด NULL และโหมด PEAK
2% Vπ ในโหมด Q+ และโหมด Q−
• ความเสถียรสูง: ด้วยระบบการทำงานแบบดิจิทัลเต็มรูปแบบ
• ขนาดกะทัดรัด: 40 มม. (กว้าง) × 30 มม. (ลึก) × 10 มม. (สูง)
• ใช้งานง่าย: ควบคุมการทำงานด้วยตนเองโดยใช้จัมเปอร์ขนาดเล็ก
การทำงานของ OEM ที่ยืดหยุ่นผ่านทาง MCU UART2
• มีโหมดการจ่ายแรงดันไบแอสสองแบบ: ก. การควบคุมไบแอสอัตโนมัติ
b. แรงดันไบแอสที่ผู้ใช้กำหนดเอง

แอปพลิเคชัน
• LiNbO3 และตัวปรับสัญญาณ MZ อื่นๆ
• NRZ, RZ แบบดิจิทัล
• การใช้งานแบบพัลส์
• ระบบการกระเจิงแบบบริลลูอินและเซ็นเซอร์แสงอื่นๆ
• เครื่องส่งสัญญาณ CATV
ผลงาน
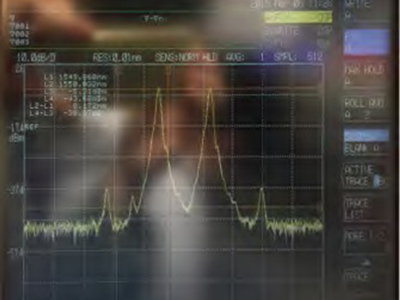
รูปที่ 1. การระงับคลื่นพาหะ
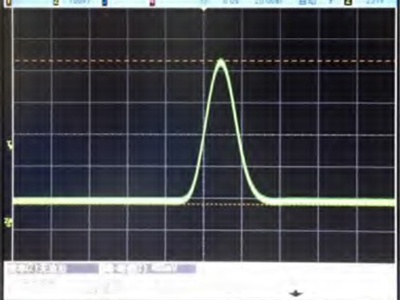
รูปที่ 2 การสร้างพัลส์

รูปที่ 3. กำลังสูงสุดของตัวปรับสัญญาณ
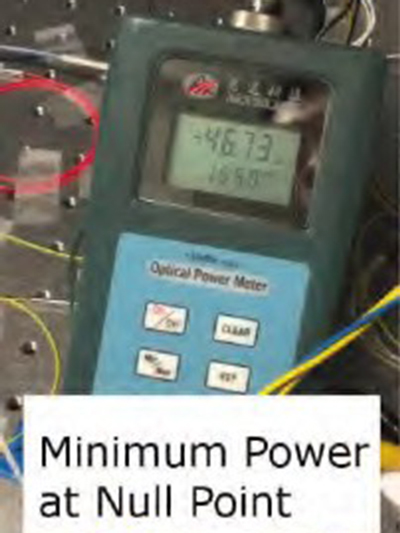
รูปที่ 4. กำลังไฟฟ้าขั้นต่ำของตัวปรับสัญญาณ
อัตราส่วนการดับไฟ DC สูงสุด
ในการทดลองนี้ ไม่ได้มีการป้อนสัญญาณ RF ใดๆ เข้าสู่ระบบ ได้ทำการวัดการดับแสงแบบ DC บริสุทธิ์เท่านั้น
1. ภาพที่ 5 แสดงกำลังแสงของเอาต์พุตตัวปรับสัญญาณ เมื่อควบคุมตัวปรับสัญญาณที่จุดสูงสุด โดยแสดงค่า 3.71 dBm ในแผนภาพ
2. ภาพที่ 6 แสดงกำลังแสงของเอาต์พุตตัวปรับสัญญาณ เมื่อควบคุมตัวปรับสัญญาณที่จุดศูนย์ (Null point) ในแผนภาพแสดงค่า -46.73 dBm ในการทดลองจริง ค่าที่ได้จะแปรผันอยู่ประมาณ -47 dBm และ -46.73 เป็นค่าที่เสถียร
3. ดังนั้น อัตราส่วนการลดทอนกระแสตรงที่เสถียรซึ่งวัดได้คือ 50.4 dB
ข้อกำหนดสำหรับอัตราการสูญพันธุ์สูง
1. ตัวปรับสัญญาณระบบต้องมีอัตราส่วนการลดทอนสูง คุณลักษณะของตัวปรับสัญญาณระบบจะเป็นตัวกำหนดอัตราส่วนการลดทอนสูงสุดที่สามารถทำได้
2. ต้องคำนึงถึงการโพลาไรซ์ของแสงขาเข้าของตัวปรับสัญญาณ ตัวปรับสัญญาณมีความไวต่อการโพลาไรซ์ การโพลาไรซ์ที่เหมาะสมสามารถปรับปรุงอัตราส่วนการลดทอนได้มากกว่า 10 เดซิเบล ในการทดลองในห้องปฏิบัติการ โดยทั่วไปแล้วจำเป็นต้องใช้ตัวควบคุมการโพลาไรซ์
3. ตัวควบคุมไบแอสที่เหมาะสม ในการทดลองอัตราส่วนการลดทอนกระแสตรง (DC extinction ratio) ของเรา พบว่าได้อัตราส่วนการลดทอน 50.4 dB ในขณะที่ข้อมูลจำเพาะของผู้ผลิตโมดูเลเตอร์ระบุไว้เพียง 40 dB เหตุผลของการปรับปรุงนี้คือ โมดูเลเตอร์บางตัวมีการเปลี่ยนแปลงค่าอย่างรวดเร็ว ตัวควบคุมไบแอส Rofea R-BC-ANY จะอัปเดตแรงดันไบแอสทุก 1 วินาที เพื่อให้มั่นใจได้ถึงการตอบสนองที่รวดเร็ว
ข้อกำหนด
| พารามิเตอร์ | นาที | ประเภท | แม็กซ์ | หน่วย | เงื่อนไข |
| ประสิทธิภาพการควบคุม | |||||
| อัตราการสูญพันธุ์ | MER 1 | 50 | dB | ||
| ซีเอสโอ2 | −55 | −65 | −70 | เดซิเบล | แอมพลิจูดการสั่น: 2%Vπ |
| ระยะเวลาการทำให้เสถียร | 4 | s | จุดติดตาม: ค่าศูนย์และค่าสูงสุด | ||
| 10 | จุดติดตาม: Q+ และ Q- | ||||
| ไฟฟ้า | |||||
| แรงดันไฟฟ้าบวก | +14.5 | +15 | +15.5 | V | |
| กระแสไฟฟ้าบวก | 20 | 30 | mA | ||
| แรงดันไฟฟ้าลบ | -15.5 | -15 | -14.5 | V | |
| กระแสไฟฟ้าลบ | 2 | 4 | mA | ||
| ช่วงแรงดันเอาต์พุต | -9.57 | +9.85 | V | ||
| ความแม่นยำของแรงดันเอาต์พุต | 346 | ไมโครโวลต์ | |||
| ความถี่ดิทเทอร์ | 999.95 | 1000 | 1000.05 | Hz | เวอร์ชัน: สัญญาณดิทเทอร์ 1kHz |
| แอมพลิจูดการสั่น | 0.1%Vπ | V | จุดติดตาม: ค่าศูนย์และค่าสูงสุด | ||
| 2%Vπ | จุดติดตาม: Q+ และ Q- | ||||
| ออปติคอล | |||||
| กำลังแสงขาเข้า3 | -30 | -5 | เดซิเมตร | ||
| ความยาวคลื่นขาเข้า | 780 | 2000 | nm | ||
1. MER ย่อมาจาก Modulator Extinction Ratio (อัตราส่วนการลดทอนของตัวปรับสัญญาณ) โดยทั่วไปแล้ว อัตราส่วนการลดทอนที่ได้จะเป็นอัตราส่วนการลดทอนของตัวปรับสัญญาณที่ระบุไว้ในเอกสารข้อมูลจำเพาะของตัวปรับสัญญาณ
2. CSO หมายถึง Composite Second Order (ค่า CSO แบบผสม) การวัดค่า CSO อย่างถูกต้องนั้น ต้องมั่นใจว่าสัญญาณ RF, ตัวปรับสัญญาณ และตัวรับสัญญาณมีคุณภาพเชิงเส้น นอกจากนี้ ค่า CSO ของระบบอาจแตกต่างกันไปเมื่อทำงานที่ความถี่ RF ต่างกัน
3. โปรดทราบว่ากำลังแสงขาเข้าไม่ตรงกับกำลังแสง ณ จุดไบแอสที่เลือกไว้ แต่หมายถึงกำลังแสงสูงสุดที่ตัวปรับสัญญาณสามารถส่งออกไปยังตัวควบคุมได้เมื่อแรงดันไบแอสอยู่ในช่วงตั้งแต่ −Vπ ถึง +Vπ
ส่วนติดต่อผู้ใช้
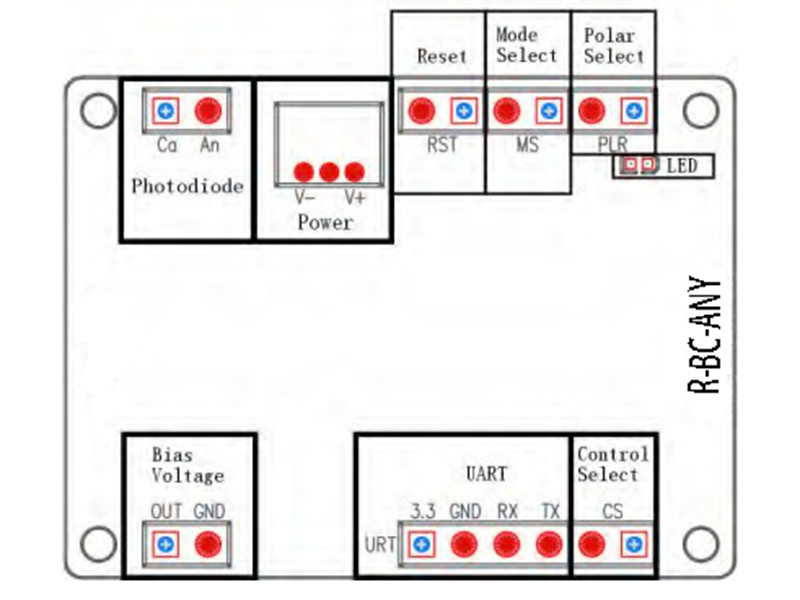
รูปที่ 5 การประกอบ
| กลุ่ม | การดำเนินการ | คำอธิบาย |
| โฟโตไดโอด 1 | PD: เชื่อมต่อแคโทดของโฟโตไดโอด MZM | ให้ผลตอบรับกระแสไฟฟ้าจากแสง |
| GND: ต่อเข้ากับขั้วแอโนดของโฟโตไดโอด MZM | ||
| พลัง | แหล่งจ่ายไฟสำหรับตัวควบคุมไบแอส | V-: ต่อกับขั้วลบ |
| V+: ต่อกับขั้วบวก | ||
| หัววัดตรงกลาง: เชื่อมต่อกับขั้วไฟฟ้ากราวด์ | ||
| รีเซ็ต | เสียบจัมเปอร์แล้วดึงออกหลังจาก 1 วินาที | รีเซ็ตคอนโทรลเลอร์ |
| การเลือกโหมด | เสียบหรือถอดจัมเปอร์ | ไม่มีจัมเปอร์: โหมด Null; มีจัมเปอร์: โหมด Quad |
| โพลา ซีเล็คท์2 | เสียบหรือถอดจัมเปอร์ | ไม่มีสายเชื่อมต่อ: ขั้วบวก; มีสายเชื่อมต่อ: ขั้วลบ |
| แรงดันไบแอส | เชื่อมต่อกับพอร์ตแรงดันไบแอส MZM | OUT และ GND จ่ายแรงดันไบแอสให้กับตัวปรับสัญญาณ |
| นำ | อย่างต่อเนื่องบน | ทำงานภายใต้สภาวะที่มั่นคง |
| เปิด-ปิด หรือ ปิด-เปิด ทุก 0.2 วินาที | การประมวลผลข้อมูลและการค้นหาจุดควบคุม | |
| เปิด-ปิด หรือ ปิด-เปิด ทุก 1 วินาที | กำลังแสงขาเข้าอ่อนเกินไป | |
| เปิด-ปิด หรือ ปิด-เปิด ทุก 3 วินาที | กำลังแสงขาเข้าแรงเกินไป | |
| ยูอาร์อาร์ท | ควบคุมการทำงานของคอนโทรลเลอร์ผ่านทาง UART | 3.3: แรงดันอ้างอิง 3.3 โวลต์ |
| GND: กราวด์ | ||
| RX: รับสัญญาณจากตัวควบคุม | ||
| TX: การส่งสัญญาณของตัวควบคุม | ||
| ควบคุมการเลือก | เสียบหรือถอดจัมเปอร์ | ไม่มีจัมเปอร์: ควบคุมด้วยจัมเปอร์; มีจัมเปอร์: ควบคุมด้วย UART |
1. ตัวปรับสัญญาณ MZ บางรุ่นมีโฟโตไดโอดภายใน ควรเลือกวิธีการตั้งค่าตัวควบคุมระหว่างการใช้โฟโตไดโอดของตัวควบคุมหรือโฟโตไดโอดภายในของตัวปรับสัญญาณ แนะนำให้ใช้โฟโตไดโอดของตัวควบคุมสำหรับการทดลองในห้องปฏิบัติการด้วยเหตุผลสองประการ ประการแรก โฟโตไดโอดของตัวควบคุมมีคุณภาพที่รับประกันได้ ประการที่สอง การปรับความเข้มของแสงขาเข้าทำได้ง่ายกว่า หมายเหตุ: หากใช้โฟโตไดโอดภายในของตัวปรับสัญญาณ โปรดตรวจสอบให้แน่ใจว่ากระแสเอาต์พุตของโฟโตไดโอดแปรผันตรงกับกำลังไฟฟ้าขาเข้าอย่างเคร่งครัด
2. ขา Polar ใช้สำหรับสลับจุดควบคุมระหว่าง Peak และ Null ในโหมดควบคุม Null (กำหนดโดยขา Mode Select) หรือ Quad+
และ Quad- ในโหมดควบคุม Quad หากไม่ได้เสียบจัมเปอร์ของขาขั้ว ระบบจะตั้งค่าจุดควบคุมเป็น Null ในโหมด Null หรือ Quad+ ในโหมด Quad ความแรงของสัญญาณ RF ก็จะมีผลต่อจุดควบคุมเช่นกัน เมื่อไม่มีสัญญาณ RF หรือความแรงของสัญญาณ RF ต่ำ ตัวควบคุมจะสามารถล็อกจุดทำงานไปยังจุดที่ถูกต้องตามที่เลือกโดยจัมเปอร์ MS และ PLR เมื่อความแรงของสัญญาณ RF เกินเกณฑ์ที่กำหนด ขั้วของระบบจะเปลี่ยน ในกรณีนี้ ส่วนหัวของ PLR ควรอยู่ในสถานะตรงกันข้าม กล่าวคือ ควรเสียบจัมเปอร์หากยังไม่ได้เสียบ หรือดึงออกหากเสียบอยู่แล้ว
การใช้งานทั่วไป
ตัวควบคุมใช้งานง่าย
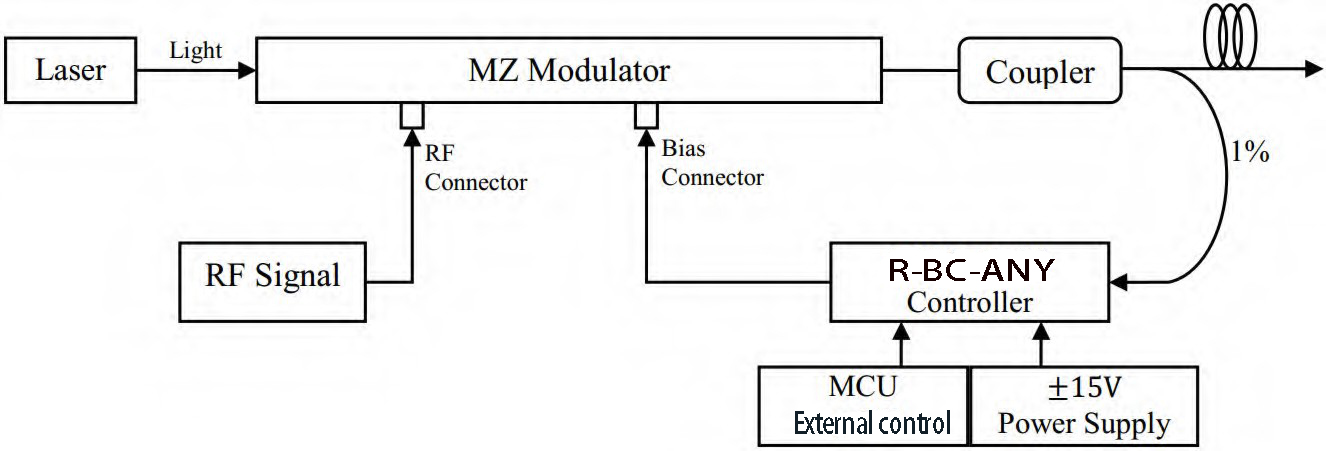
ขั้นตอนที่ 1. เชื่อมต่อพอร์ต 1% ของตัวเชื่อมต่อเข้ากับโฟโตไดโอดของตัวควบคุม
ขั้นตอนที่ 2. เชื่อมต่อเอาต์พุตแรงดันไบแอสของตัวควบคุม (ผ่านขั้วต่อ SMA หรือขั้วต่อ 2 ขา ขนาด 2.54 มม.) เข้ากับพอร์ตไบแอสของตัวปรับสัญญาณ
ขั้นตอนที่ 3. จ่ายแรงดันไฟฟ้ากระแสตรง +15V และ -15V ให้กับตัวควบคุม
ขั้นตอนที่ 4. รีเซ็ตตัวควบคุม แล้วมันจะเริ่มทำงานได้
หมายเหตุ: โปรดตรวจสอบให้แน่ใจว่าสัญญาณ RF ของระบบทั้งหมดเปิดอยู่ก่อนที่จะรีเซ็ตตัวควบคุม
บริษัท Rofea Optoelectronics นำเสนอผลิตภัณฑ์หลากหลายประเภทสำหรับการใช้งานเชิงพาณิชย์ ได้แก่ อุปกรณ์ปรับสัญญาณแสงเชิงไฟฟ้า (Electro-optic modulator), อุปกรณ์ปรับเฟส (Phase modulator), อุปกรณ์ปรับความเข้มแสง (Intensity modulator), โฟโตดีเทคเตอร์ (Photodetector), แหล่งกำเนิดแสงเลเซอร์, เลเซอร์ DFB, เครื่องขยายสัญญาณแสง (Optical amplifier), EDFA, เลเซอร์ SLD, การปรับสัญญาณ QPSK, เลเซอร์พัลส์ (Pulse laser), เครื่องตรวจจับแสง (Light detector), โฟโตดีเทคเตอร์แบบสมดุล (Balanced photodetector), ตัวขับเลเซอร์ (Laser driver), เครื่องขยายสัญญาณใยแก้วนำแสง (Fiber optic amplifier), เครื่องวัดกำลังแสง (Optical power meter), เลเซอร์บรอดแบนด์ (Broadband laser), เลเซอร์ปรับได้ (Tunable laser), เครื่องตรวจจับแสง (Optical detector), ตัวขับไดโอดเลเซอร์ (Laser diode driver) และเครื่องขยายสัญญาณใยแก้วนำแสง (Fiber amplifier) นอกจากนี้ เรายังจัดหาอุปกรณ์ปรับสัญญาณเฉพาะทางสำหรับการปรับแต่งตามความต้องการ เช่น อุปกรณ์ปรับเฟสแบบอาร์เรย์ 1*4, อุปกรณ์ปรับสัญญาณ Vpi ต่ำมาก และอุปกรณ์ปรับสัญญาณอัตราส่วนการดูดกลืนแสงสูงมาก ซึ่งส่วนใหญ่ใช้ในมหาวิทยาลัยและสถาบันต่างๆ
หวังว่าผลิตภัณฑ์ของเราจะเป็นประโยชน์ต่อคุณและการวิจัยของคุณ


